
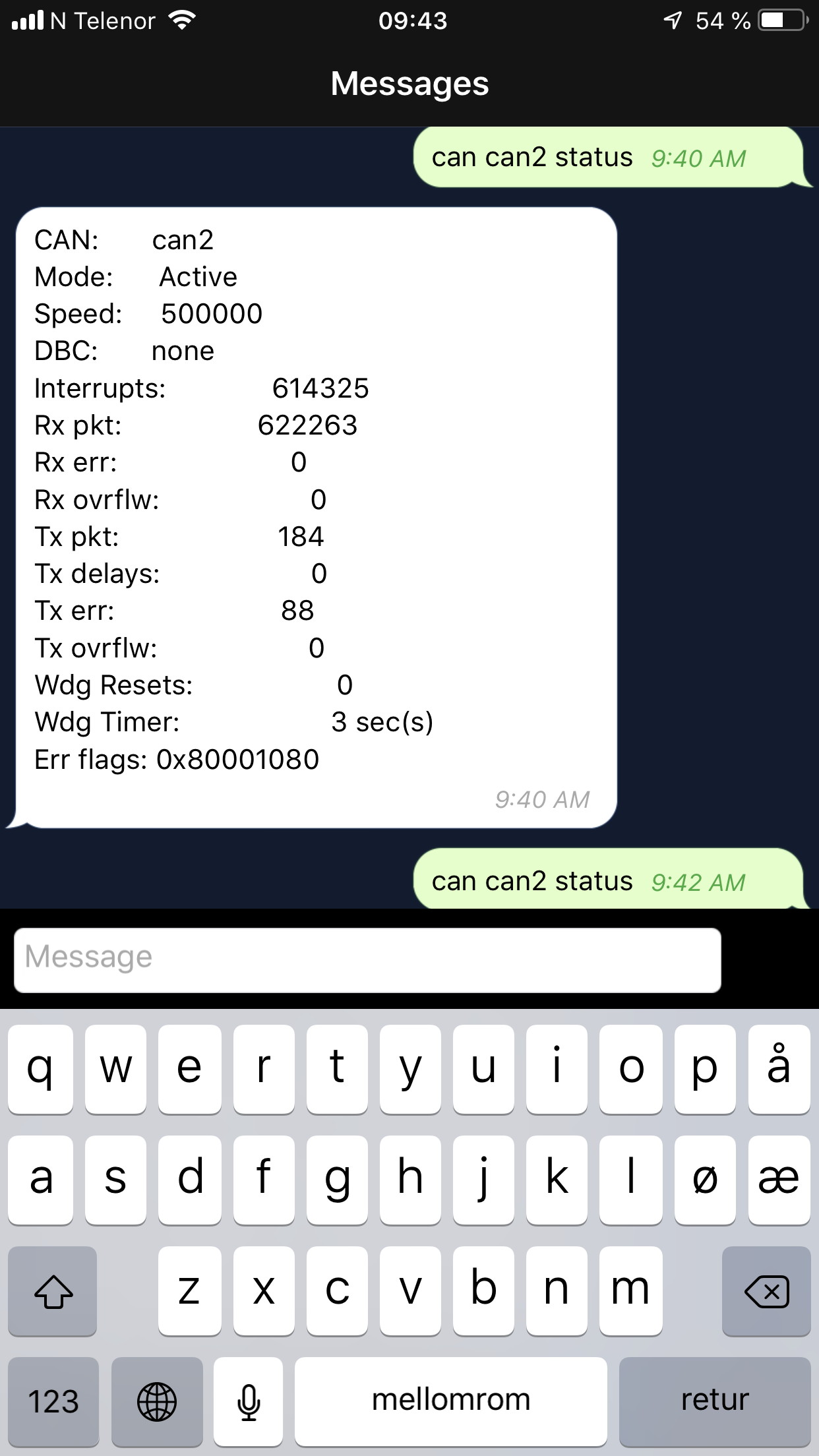
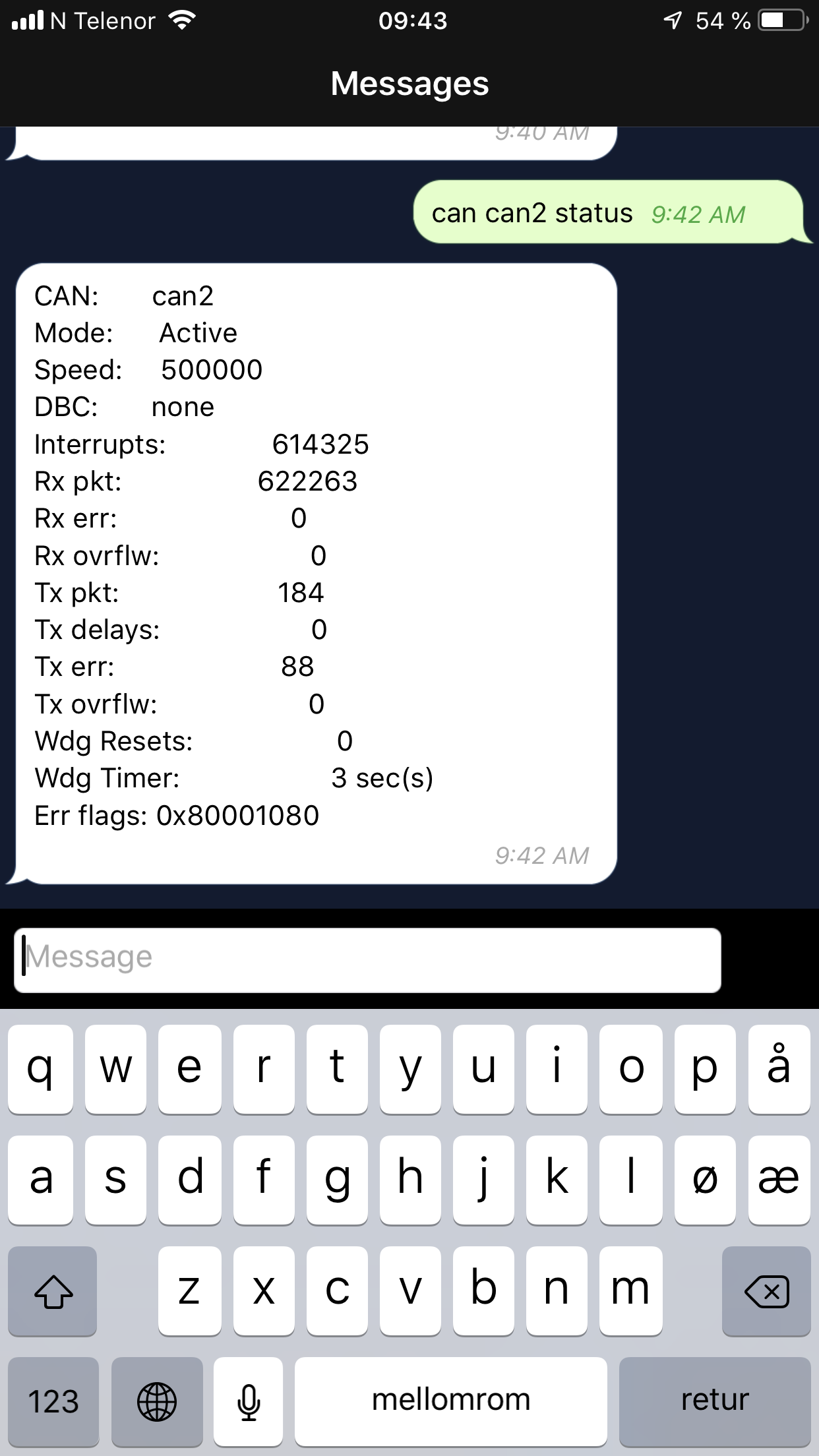
Looks the same, see attachment. -Stein Arne- On 2019-04-01 09:38, Mark Webb-Johnson <mark@webb-johnson.net> wrote:
This is the thread from last summer talking about CAN bus lock-ups.
I’m guessing this is still happening for Leaf? Since the changes made below (back then), I haven’t seen it in my car.
Next time this happens to you guys (can2 stopped), can you get a ‘can can2 status’, wait 30 seconds, and repeat. Then send it here for us to look at.
Regards, Mark.
On 7 Jul 2018, at 10:37 PM, Mark Webb-Johnson <mark@webb-johnson.net(mailto:mark@webb-johnson.net)> wrote: I’m trying to recreate this with my three-can-buses-connected DB9 plugged in. Transmitting on CAN1 should make it appear on CAN2 and CAN3.
Here is what I see:
OVMS# can can1 start active 1000000 Can bus can1 started in mode active at speed 1000000bps OVMS# can can2 start active 1000000 Can bus can2 started in mode active at speed 1000000bps OVMS# test cantx can1 25000 Testing 25000 frames on can1 Transmitted 25000 frames in 6.466209s = 258us/frame
OVMS# can can1 status CAN: can1 Mode: Active Speed: 1000000 Interrupts: 24771 Rx pkt: 0 Rx err: 0 Rx ovrflw: 0 Tx pkt: 24880 Tx delays: 24703 Tx err: 0 Tx ovrflw: 109 Err flags: 0 OVMS# can can2 status
CAN: can2 Mode: Active Speed: 1000000 Interrupts: 19084 Rx pkt: 24770 Rx err: 0 Rx ovrflw: 1 Tx pkt: 0 Tx delays: 0 Tx err: 0 Tx ovrflw: 0 Err flags: 0x2040
Note the err flags 0x2040 on CAN2, but the bus remains up and working fine.
Repeating the test gives us:
OVMS# test cantx can1 25000 Testing 25000 frames on can1 Transmitted 25000 frames in 6.479670s = 259us/frame
OVMS# can can1 status CAN: can1 Mode: Active Speed: 1000000 Interrupts: 49546 Rx pkt: 0 Rx err: 0 Rx ovrflw: 0 Tx pkt: 49771 Tx delays: 49417 Tx err: 0 Tx ovrflw: 207 Err flags: 0
OVMS# can can2 status CAN: can2 Mode: Active Speed: 1000000 Interrupts: 38288 Rx pkt: 49545 Rx err: 0 Rx ovrflw: 3 Tx pkt: 0 Tx delays: 0 Tx err: 0 Tx ovrflw: 0 Err flags: 0x2040
Looking at the mcp2515 code, it seems that Err flags are only stored "if (intstat & 0b10100000)”. That is "ERRF 0x80 = message tx/rx error” or "ERRIF 0x20 = overflow / error state change”. It is also set to "(intstat & 0b10100000) << 8 | errflag”, so doesn’t show all the error statuses. It is hard to rely on that for other errors/status on lock-up. Given that error_flags is a uint32_t, I think we can store more in it to allow for better diagnosis.
I changed the mcp2515 driver to always set error_flags, on each interrupt handled (except spurious interrupts with no flags found), as follows:
SSSSSSSSFFFFFFFF***EB01TLLLLLLLL SSSSSSSS = intstat FFFFFFFF = errflag B = RXB0 or RXB1 overflow flags cleared 0 = RXB0 overflowed 1 = RXB1 overflowed T = TX buffer has become available E = Error/WakeUp flags were cleared LLLLLLLL = intflag
I did find a problem on line 300: if (intstat & 0b10100000). It think that should be 0b11100000 (to also pickup the RXB0 overflow), and removed the m_status.rxbuf_overflow++ from RXB0 overflow (as it is not really an overflow - as RXB1 got the data).
With those changes made, I get:
OVMS# test cantx can1 25000 Testing 25000 frames on can1 Transmitted 25000 frames in 6.389849s = 255us/frame
OVMS# can can1 status CAN: can1 Mode: Active Speed: 1000000 Interrupts: 24777 Rx pkt: 0 Rx err: 0 Rx ovrflw: 0 Tx pkt: 24884 Tx delays: 24739 Tx err: 0 Tx ovrflw: 116 Err flags: 0x00000000
OVMS# can can2 status CAN: can2 Mode: Active Speed: 1000000 Interrupts: 18935 Rx pkt: 24777 Rx err: 0 Rx ovrflw: 0 Tx pkt: 0 Tx delays: 0 Tx err: 0 Tx ovrflw: 0 Err flags: 0x01000001
I don’t think I’ve fixed anything (apart from that minor issue with RXB0 overflow diagnostics), but hopefully the new error_flags display should help finding out what is causing this lockup. Hopefully I haven’t broken anything.
Regards, Mark.
On 7 Jul 2018, at 10:42 AM, Tom Parker <tom@carrott.org(mailto:tom@carrott.org)> wrote:
On 07/07/18 00:05, Mark Webb-Johnson wrote:
Err flags 0x2040. The 0x20 part is the error interrupt. The 0x40 part is "RX0OVR: Receive Buffer 0 Overflow Flag bit”.
Where the number on ‘can can2 status’ moving at all? Or completely stuck? None of the can can2 status numbers change when the can bus is broken. After power cycling it they move.
Seems different than the fault Greg and I are seeing. This one likely to be interrupt flag, or buffer overflow, not being cleared correctly. I’m guessing the overflow because that just doesn’t seem correct in mcp2515::RxCallback(). I’ll focus on that and have a look. I just checked the car again and it stopped with Rx ovrflw number only 1281, half what it got to last time.
_______________________________________________ OvmsDev mailing list OvmsDev@lists.openvehicles.com(mailto:OvmsDev@lists.openvehicles.com) http://lists.openvehicles.com/mailman/listinfo/ovmsdev _______________________________________________ OvmsDev mailing list OvmsDev@lists.openvehicles.com(mailto:OvmsDev@lists.openvehicles.com) http://lists.openvehicles.com/mailman/listinfo/ovmsdev _______________________________________________ OvmsDev mailing list OvmsDev@lists.openvehicles.com http://lists.openvehicles.com/mailman/listinfo/ovmsdev
{kind=link}
{kind=link}